Setting-up OpenPLC
The OpenPLC is a opensource Programmable Logic Controllers (PLC) alternative.
Due to this, it is possible to understand the black box of these systems.
It could be easily used with a Raspberry Pi.
Install Raspbian
Download the current Raspbian Lite Image from https://www.raspberrypi.org/downloads/raspbian/.
Unzip the Image and copy it to the SD card:
$ unzip 2017-09-07-raspbian-stretch-lite.zip $ sudo dd if=2017-09-07-raspbian-stretch-lite.img of=/dev/mmcblk0 bs=4M
Install Wiringpi
$ sudo apt-get update $ sudo apt-get dist-upgrade $ sudo apt-get install git-core
Clone the GIT and build the WiringPi Software
$ git clone git://git.drogon.net/wiringPi $ cd ~/wiringPi $ ./build
Test the output with WiringPi.
With the write command the output could be set to high or low.
$ gpio mode 4 out $ gpio write 4 1 $ gpio write 4 0
Pin Layout of the Raspberry Pi.
e +-----+
d | o o <- GND
g | o o |
e | o o |
| o o |
o | o o |
f | o o |
| o o |
R | o o |
a | o o |
s | o o |
p | o o |
b | o o |
e WiPi4 -> o o |
r | o o |
r | o o |
y | o o |
| o o |
P | o o |
i | o o |
| o o |
+-----+
Install OpenPLC on the Raspberry Pi.
$ sudo apt-get install build-essential pkg-config bison flex $ sudo apt-get install autoconf automake libtool make nodejs git $ cd $ git clone https://github.com/thiagoralves/OpenPLC_v2.git
Change into the OpenPLC folder and build it.
This will take some time.
$ cd OpenPLC_v2 $ ./build.sh
Enable DNP3 on the controller.
OpenPLC can talk Modbus/TCP and DNP3 SCADA protocols. Modbus/TCP is already added to the system. Do you want to add support for DNP3 as well (Y/N)? Y
Select the device, where to run OpenPLC.
In this case RaspberryPi (4).
The OpenPLC needs a driver to be able to control physical or virtual hardware. Please select the driver you would like to use: 1) Blank 5) UniPi 9) Arduino+RaspberryPi 2) Modbus 6) PiXtend 10) Simulink 3) Fischertechnik 7) Arduino 4) RaspberryPi 8) ESP8266 #? 4
Add OpenPLC to rc.local to start it at boot up.
$ sudo nano /etc/rc.local
Add the following two lines before exit 0 in the rc.local.
cd /home/pi/OpenPLC_v2 su root -c 'nodejs server.js > /dev/null &'
Reboot the Raspberry Pi.
§ sudo reboot
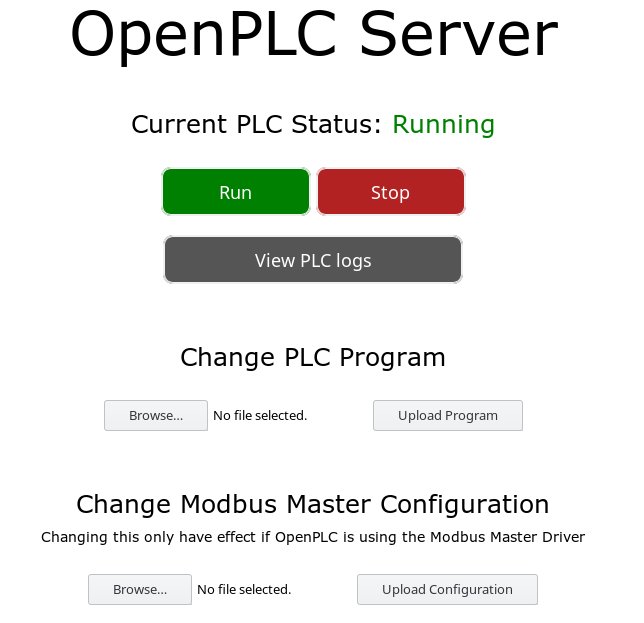
Open a web browser on
Now it is time to upload the first Structured Text program to the PLC.
There is also the possibility to use the OpenPLC Editor http://www.openplcproject.com/plcopen-editor.
PROGRAM My_Program
VAR
button AT %IX0.0 : BOOL := 0;
output AT %M0.0 : BOOL := 0;
out2 AT %QX0.2 : BOOL := 0;
END_VAR
VAR
NOT9_OUT : BOOL;
END_VAR
IF output = 1 THEN
output := 0;
else
output := 1;
END_IF;
out2 := output;
END_PROGRAM
CONFIGURATION Config0
RESOURCE Res0 ON PLC
TASK TaskMain(INTERVAL := T#50ms,PRIORITY := 0);
PROGRAM Inst0 WITH TaskMain : My_Program;
END_RESOURCE
END_CONFIGURATION
Pin Layout of the Raspberry Pi.
e +-----+
d QX1.2 -> o o <- GND
g QX1.1 -> o o |
e QX1.0 -> o o |
GND -> o o |
o QX0.7 -> o o |
f GND -> o o |
N/A -> o o |
R QX0.6 -> o o |
a QX0.5 -> o o |
s QX0.4 -> o o |
p GND -> o o |
b QX0.3 -> o o |
e QX0.2 -> o o |
r GND -> o o |
r QW0 -> o o |
y QX0.1 -> o o |
QX0.0 -> o o |
P GND -> o o |
i 5V -> o o |
5V -> o o |
+-----+
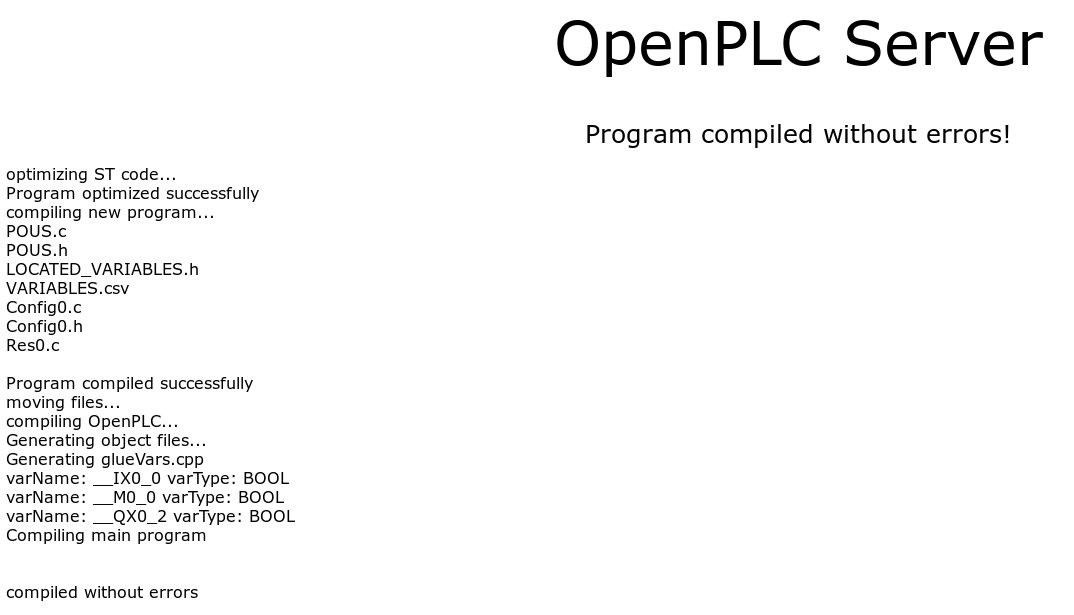
After the upload the program will be compiled.
If everything is fine, there should be the output: compiled without errors.
Acknowledgement
- Thiago Rodrigues Alves from http://www.openplcproject.com
- Gordon Henderson from http://wiringpi.com/

Leave a Reply